一、问题描述 见标题 二、问题分析 错误日志: 手动执行gitlab-rake gitlab:backup:create的时候,发现了日志。 Warning: Your gitlab.rb and gitlab-secrets.json files contain sensitive dataand are not included in this backup. You will need these files to restore a backup.Please back them up manually. …

背景需求 需要仿真fanuc的姿态。 解决方法 python 代码如下: 使用案例 修正误差前视频如下: 修正误差后的视频如下效果如下,通过仿真发现了J2和J3轴之间存在联动,计算校准后解决。
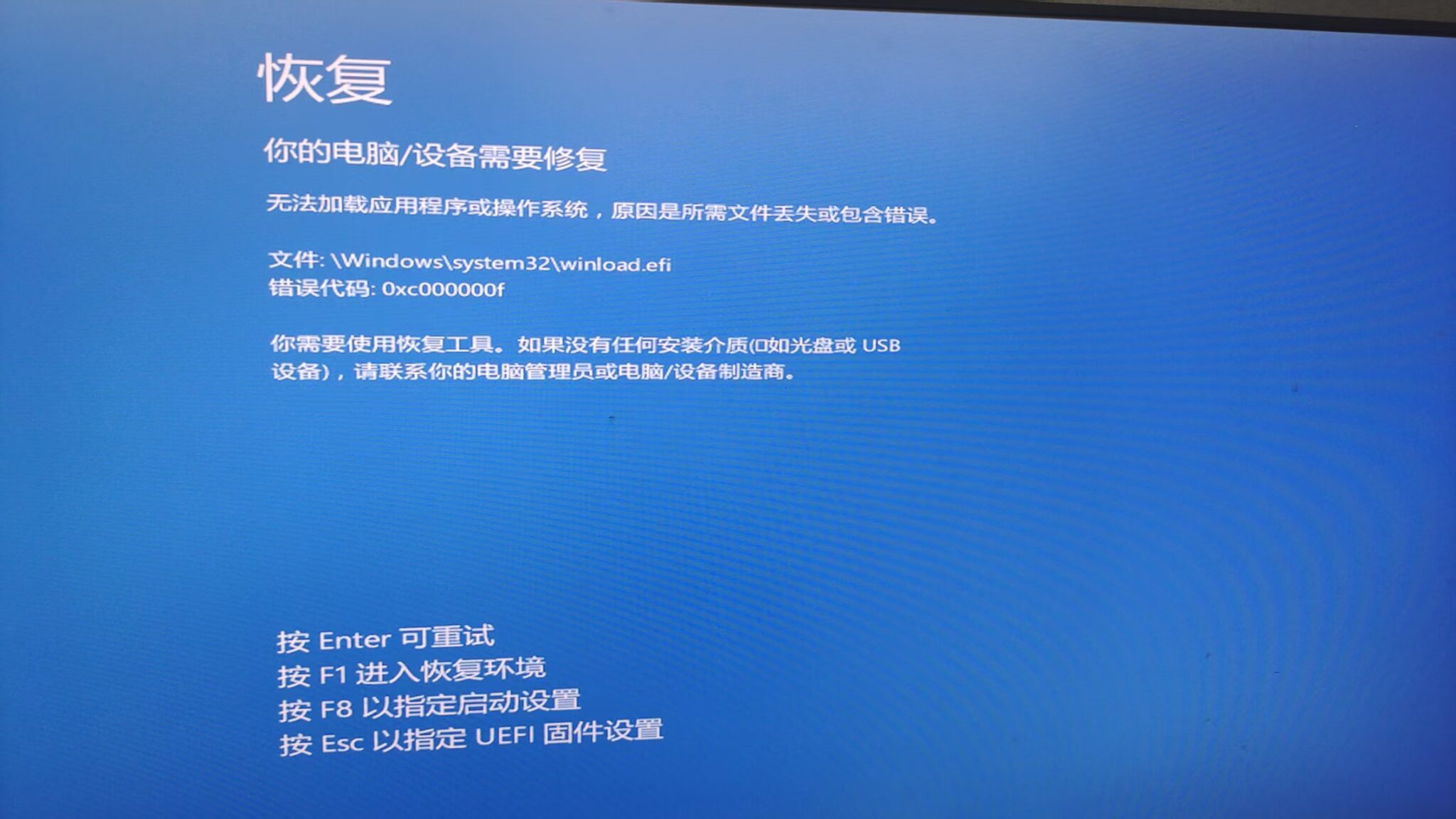
现象 早上到公司,发现电脑蓝屏了。估计是windows更新导致蓝屏,遂fix。 试了一下常规自动修复无法生效,遂iso修复。 如果自动修复无效,问题可能出在引导记录上。我们可以手动重建: 再次进入恢复环境(“选择一个选项”界面):疑难解答 -> 高级选项 -> 命令提示符。 修复过程 刚好手里有一个ventory的U盘,里面有windows11 iso镜像。 重启成功看到了windows更新30%的标识,修复完成!
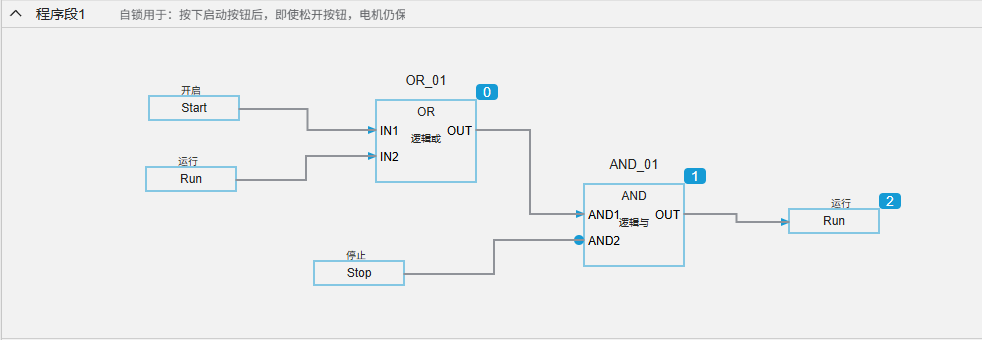
自锁 自锁通常用于: 按下启动按钮后,即使松开按钮,电机仍保持运行。 只有按下停止按钮,电机才停止。 互锁 互锁常用于两个相互排斥的动作,比如: 正转 / 反转 伸出 / 缩回不能同时为真,否则会造成机械冲突。
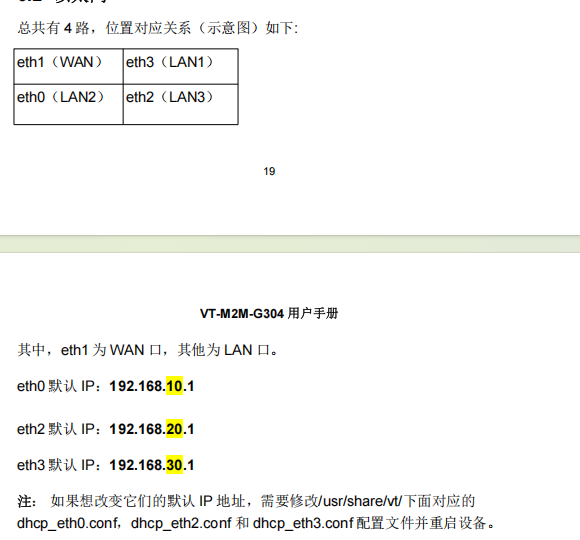
需求 禁用dhcp ip。 原理机制 系统启动时,通过/etc/rc.local文件 设置了静态ip地址,并开启了udhcp服务。 /etc/rc.local出厂内容: 静态IP实现方案 修改之后的/etc/rc.local文件:

硬件 主板:华北工控MATX-6556 CPU:飞腾D30000 系统:Kylin-Desktop-V10-SP1-2503-Release-20250430-ARM64.iso 试用申请下载-麒麟软件-国产操作系统 硬盘:金士顿Nvme 2T 内存:金士顿 DDR4 16GB 安装过程 常见问题 1、安装银河麒麟桌面系统后,无法识别网卡 因为飞腾D3000的网卡是从CPU引出的,只有银河麒麟24/2503以上V10系统才支持CPU网卡。需要更新系统版本。这个问题无法通过安装驱动解决。 2、能安装V11服务器版吗?…
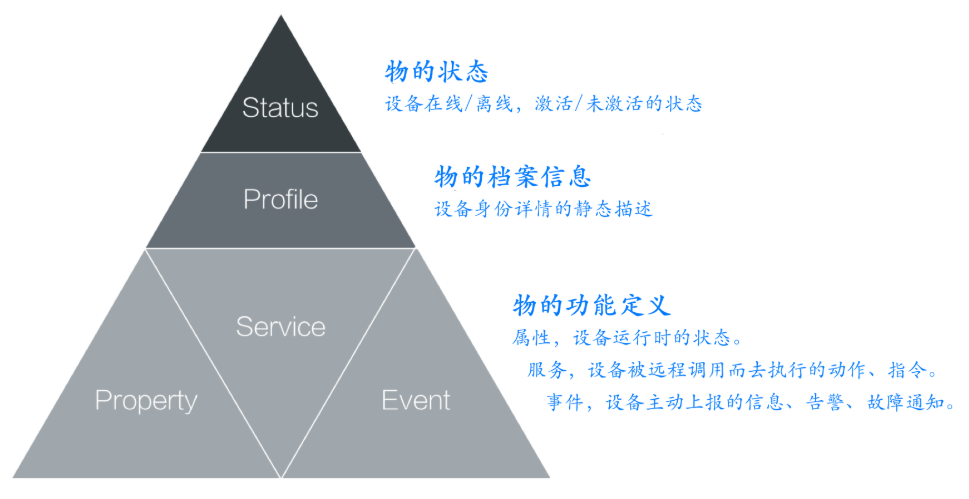
参考资料 TSL 最初并非由国际标准组织(如 ISO/IEC 或 IEEE)定义,而是由 阿里云(Alibaba Cloud)主导提出并实现 的一种 事实标准(de facto standard)。 最早出现在 阿里云物联网平台(Aliyun IoT Platform) 的 《物模型 TSL 规范》 文档中。 后续被大量中国物联网平台借鉴(例如华为 OceanConnect、百度天工、腾讯连连、涂鸦等),形成业界通用的 JSON 结构模板。 该规范的思想与国际标准 W3C WoT (Web of Things) T…

官方地址 部署流程 nginx 下载地址:https://nginx.org/download/nginx-1.28.0.zip 测试配置文件: 在C:/builds/wx.api/ 下建立index.php内容如下: 测试nginx.conf 内容见下: 使用nssm注册为系统服务。 php 下载 地址:https://downloads.php.net/~windows/releases/archives/php-7.1.9-nts-Win32-VC14-x64.zip 下载并解压到C:\php\php-7.1…
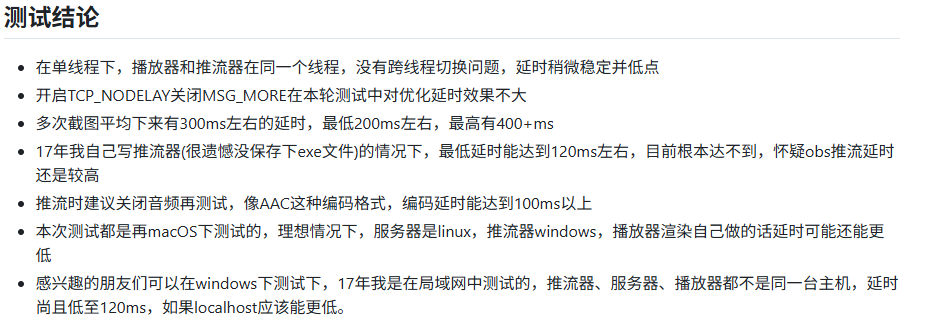
问题概览 使用jessibuca开源版通过ZLMediaKit播放海康rtsp流时,能感受到有6秒延迟,因此探究一下。 经过测试: 总结 所以延时敏感的情况下一般不开启B帧,这种情况下编码延时应该是毫秒级别,不是很大。 问题探究 官方文档定义 zlmediakit 修改config.ini配置文件,将[rtsp]的lowLatency=1,启用低延时模式 jessibuca
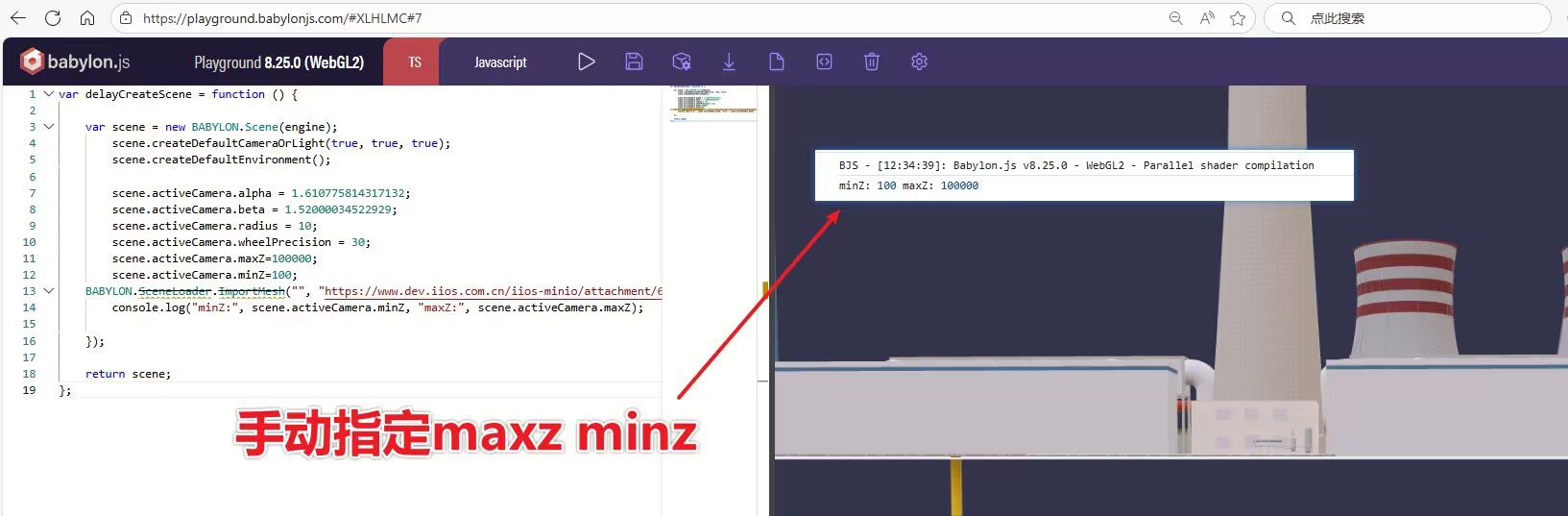
一、问题 babylonjs场景,需要动态加载glb,但是发现glb会出现mesh面闪烁问题。 经过研究后发现:babylonjs 先import glb Mesh再添加灯光、相机,那glb不会闪。反之先创建灯光、相机 后 import glb Mesh ,那么glb就会很闪烁。 经过与大佬们沟通发现,是因为每次创建Camera时,相机会自动计算maxZ/minZ,所以会避免闪烁。但如何先加载glb,再创建mesh时,就会闪烁,因为Camera的计算精度不对。 解决方法: 二、测试记录 三、babylonjs自动计…