整体介绍 📡 DH+ (Data Highway Plus):经典但强大的工业局域网 DH+ 是罗克韦尔自动化(原 Allen-Bradley)于 1980 年代推出的专有工业现场总线网络,专为 PLC、HMI 和其他自动化设备之间的实时对等通信而设计。它在 80 年代和 90 年代被大规模部署,至今仍在无数工厂中运行。 技术栈 技术规格汇总 参数 规格 通信速率 57.6 Kbps / 115.2 Kbps / 230.4 Kbps(所有节点必须相同) 最大节点数 64 个(地址范围为八进制 00…

背景需求 需要仿真fanuc的姿态。 解决方法 python 代码如下: 使用案例 修正误差前视频如下: 修正误差后的视频如下效果如下,通过仿真发现了J2和J3轴之间存在联动,计算校准后解决。
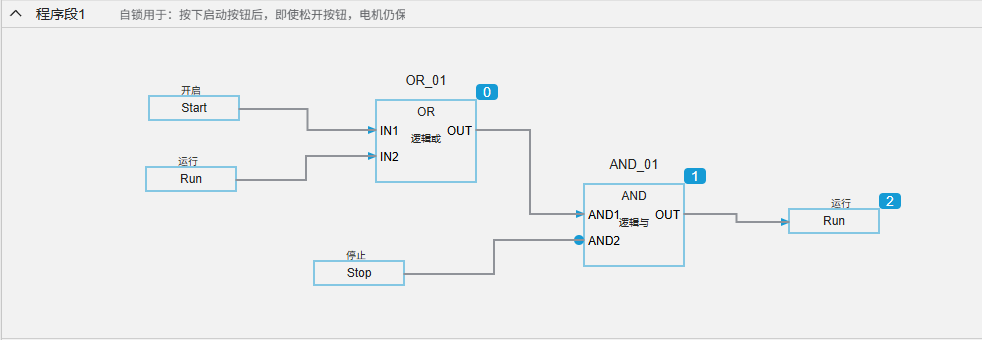
自锁 自锁通常用于: 按下启动按钮后,即使松开按钮,电机仍保持运行。 只有按下停止按钮,电机才停止。 互锁 互锁常用于两个相互排斥的动作,比如: 正转 / 反转 伸出 / 缩回不能同时为真,否则会造成机械冲突。
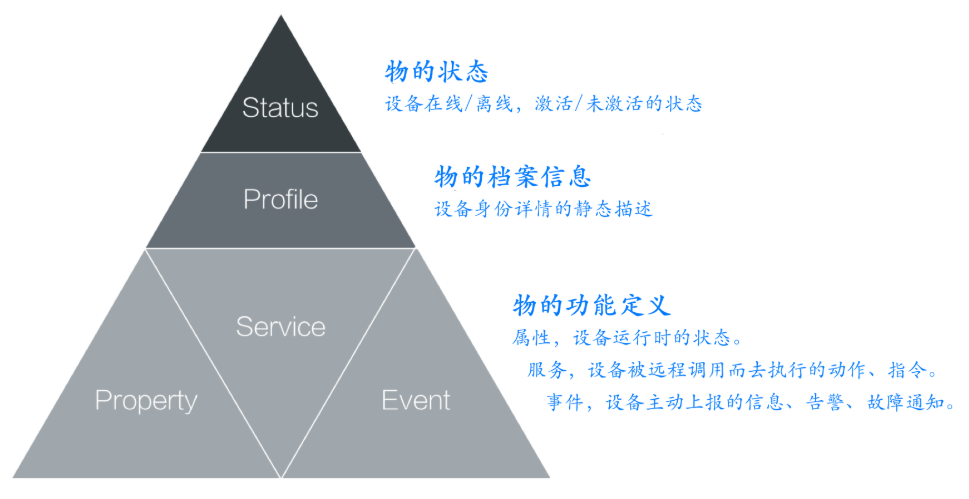
参考资料 TSL 最初并非由国际标准组织(如 ISO/IEC 或 IEEE)定义,而是由 阿里云(Alibaba Cloud)主导提出并实现 的一种 事实标准(de facto standard)。 最早出现在 阿里云物联网平台(Aliyun IoT Platform) 的 《物模型 TSL 规范》 文档中。 后续被大量中国物联网平台借鉴(例如华为 OceanConnect、百度天工、腾讯连连、涂鸦等),形成业界通用的 JSON 结构模板。 该规范的思想与国际标准 W3C WoT (Web of Things) T…

空气断路器/真空断路器区别 空开即空气开关的简称,又叫做空气断路器。与之相对的是真空断路器。 二者的区别在于,空气断路器的灭弧装置,是依靠拉长电弧(电弧就是电火花),再依靠空气冷却进行灭弧。而 真空断路器,是依靠内部真空泡灭弧。 真空断路器 孰优孰劣,恐怕听了二者的名字就知道。空气断路器由于内部结构长期与空气接触,且灭弧装置结构复杂,很容易受到温度、湿度的影响和空气的侵蚀。而真空断路器内部结构简单,完全与空气隔绝,故而故障率和寿命都比空气断路器的要优质。 真空断路器的价格也非常可观。 微断 常用于家庭或小型电路。 …
XFC - eXtreme 快速控制技术 |倍福全球 需求场景 想基于EtherCAT技术,实现高于10K/S的采样速率,采集音频、振动、无线电等高频信号。 但是EtherCAT同步采集技术采集速率一般仅1~2ms一次,所以需要通过XFC Oversampling超采样技术,在从站高速采样后缓存至PDO中,然后是总线周期内一次返回。 实现技术 借助 XFC (eXtreme Fast Control) 技术,无论 EtherCAT 循环时间如何,都可以最大限度地提高 采样率。 在 EtherCAT 网络中,测量数据…
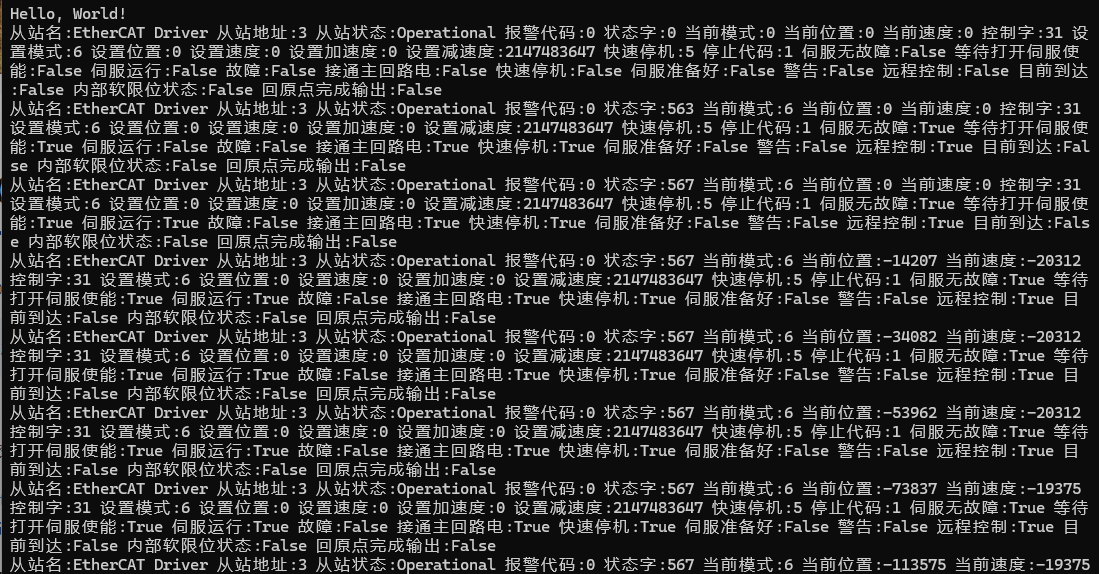
前期资料:C#通过SOEM+Leal.Core.Net.EtherCAT开发EtherCAT主站 - 阅山 博主代码: ethercatdemo\ethercatdemo\Program.cs: ethercatdemo\ethercatdemo\EtherCAT.cs 二、测试结果 电机正常运行,且输出日志: