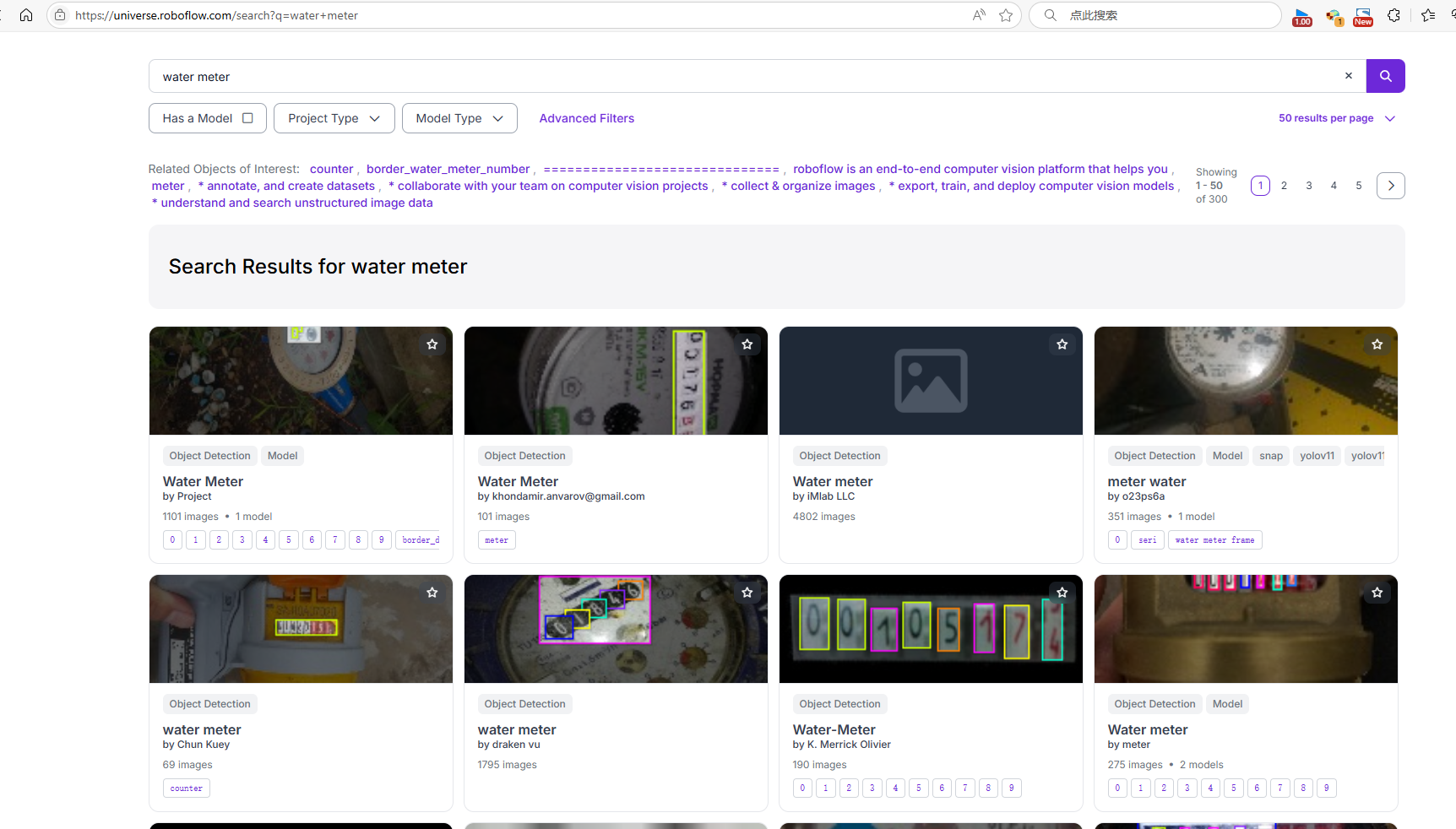
一、roboflow 地址1:https://universe.roboflow.com/search?q=water+meter 地址2:meter Object Detection Dataset by feifans workspace

XFC - eXtreme 快速控制技术 |倍福全球 需求场景 想基于EtherCAT技术,实现高于10K/S的采样速率,采集音频、振动、无线电等高频信号。 但是EtherCAT同步采集技术采集速率一般仅1~2ms一次,所以需要通过XFC Oversampling超采样技术,在从站高速采样后缓存至PDO中,然后是总线周期内一次返回。 实现技术 借助 XFC (eXtreme Fast Control) 技术,无论 EtherCAT 循环时间如何,都可以最大限度地提高 采样率。 在 EtherCAT 网络中,测量数据…
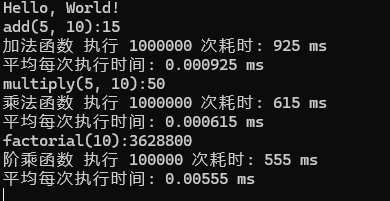
场景 想找一个支持windows/linux/armlinux的脚本引擎。 Jint总结 博主认为基本满足跨平台嵌入式运行场景; Jint功能测试代码 性能测试代码 Windows执行结果: Linux-Armx64 800MHZ 嵌入式设备执行结果: Jint安全使用注意事项 Jint 是一个 .NET 的 JavaScript 解释器,在使用时需要注意以下安全性问题: 1. 脚本执行限制 2. 沙箱环境隔离 3. 输入验证 4. 权限控制 5. 错误处理 6. 其他注意事项
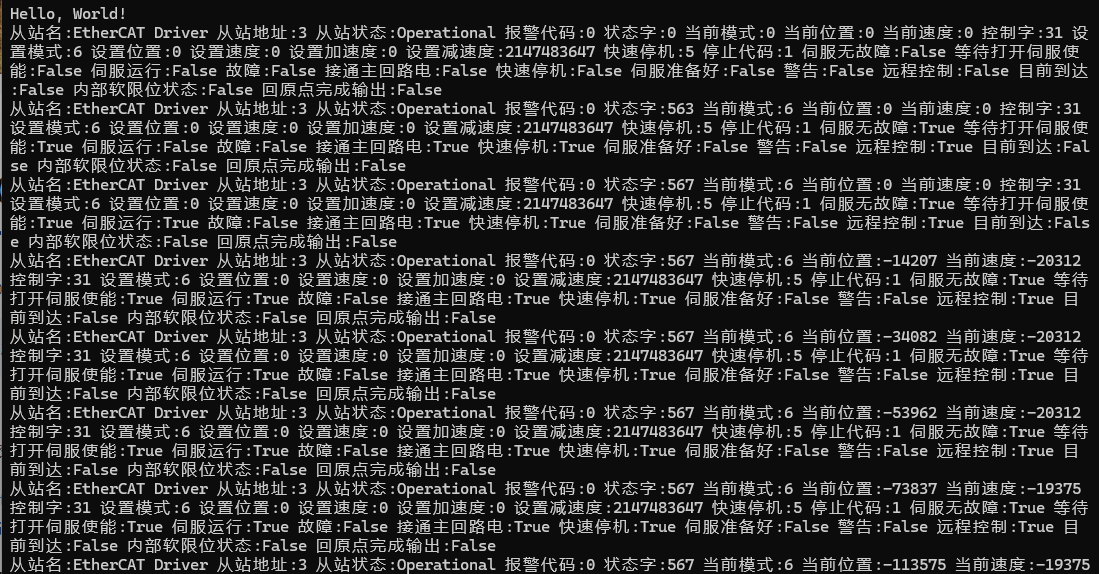
前期资料:C#通过SOEM+Leal.Core.Net.EtherCAT开发EtherCAT主站 - 阅山 博主代码: ethercatdemo\ethercatdemo\Program.cs: ethercatdemo\ethercatdemo\EtherCAT.cs 二、测试结果 电机正常运行,且输出日志:

博主仅仅是记录一下,避免遗忘。 一、编码器 博主使用了欧姆龙的单端A/B/Z三相增量式编码器: 施耐德PLC配置见下: 编码器的块的配置效果: 二、步进电机驱动器 PTO块配置见下: PTO块使用见下: 三、PID PID块定义: PID块的代码: PID块的引用: 附件 源程序 https://www.claves.cn/wp-content/uploads/2025/07/swing.zip

一、参考链接 https://pysoem.readthedocs.io 二、初步使用 博主环境 系统:Windows 11 23H2 Python: Python 3.11.7 pysoem安装 npcap下载安装 https://npcap.com 博主安装的版本:npcap-1.82.exe 查询windows上的适配器 初次连接 VS Code直接调试结果: 找到了3个从站。 提醒 博主放弃pysoem,直接使用了C#: C#通过Leal.Core.Net.EtherCAT测试新力川CL3-D57H步进驱动…
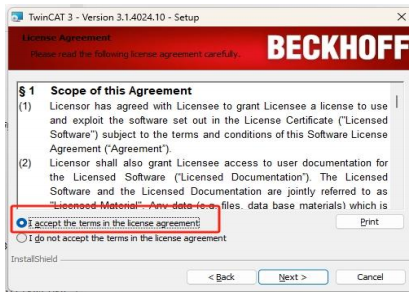
参考自:中盛EtherCAT设备文档 一、软件介绍 二、软件使用 TwinCAT 3 安装软件说明 倍福公司提供的 TwinCAT3 软件系统是一个基于 PC 的自动化系统。安装 TwinCAT3 的任何一台 PC 都可以成为一个实时控制系统,可作为 EtherCAT 主站使用。(提示:TwinCAT 对网卡型号有要求,要确保所使用的网卡支持 TwinCAT) 软件安装 安装完成后,一定要重启电脑。否则Scan是灰色的。 TwinCAT更新从站描述文件 从从站设备商处索要XML,更新至TwinCAT安装目录以下位…
一、问题现象 service中仅仅使用visionGatewayRepository.findAllByCompanyId(UserUtils.getCompanyId(), pageable);查询了列表,然后对列表的数据进行了修改,直接通过Controller返回了前端,但是发现数据库的数据被修改了。 二、问题分析 原因解释 当您从数据库查询实体对象时,JPA 会将这些对象纳入持久化上下文(Persistence Context)管理。在默认情况下: 为什么没有调用 save() 也会更新 这是因为在以下情况下…