直接说结论:你这个场景(多 iframe + 工业系统 + 并发调用)——必须用 postMessage + MessageChannel + Promise RPC,这是浏览器内通信的“准工业级方案”。 我给你一个可落地的完整设计,重点解决: 一、整体架构设计 1)通信拓扑(推荐) 👉 核心思想: 2)通信机制 建立连接(一次性) 后续通信 二、核心能力设计 你需要实现这几个模块: 模块 作用 Connection Manager 管理 iframe 连接 RPC Core 请求/响应机制 Ser…

可以用,而且强烈建议你用 tool calling(函数调用)来做这件事。不然你会遇到典型问题:HTML输出不完整、格式漂移、混入解释文本、不可解析。 下面直接给你一个工程化结论 + 落地方案。 一、结论(你这个场景是否适合 Tool Call) 你的需求: “让 LLM 根据需求生成 HTML5 页面” 👉 非常适合用 tool call,原因: ✔ 优势 二、推荐设计(核心) ✅ 定义一个工具:generate_html 三、调用流程(标准架构) 四、Python实现…

新发现的网站:https://spark-arena.com/leaderboard 想用新版本建议参考此文:Nvidia DGX Spark 集群分别使用vLLM和SGLang部署 Qwen3.5-35B-A3B 技术方案-CSDN博客 用老版本模型,可以使用官方步骤:用于推理的 vLLM | DGX Spark | NVIDIA 开发者 测试推理效率 vllm 经过测试DGX Spark 128GB 用vllm运行Qwen/Qwen3.5-35B-A3B-FP8 token大概50token/s速率,占用105…
编写过程 新建目录.openclaw/workspace/skills/helloyyp 新建文件SKILL.md 新建文件:scripts/hello.py 测试结果 总结
VoltAgent/awesome-openclaw-skills: The awesome collection of OpenClaw skills. 5,400+ skills filtered and categorized from the official OpenClaw Skills Registry.🦞 openclaw/skills: All versions of all skills that are on clawhub.com archived 使用一下配置部署后,可以对…
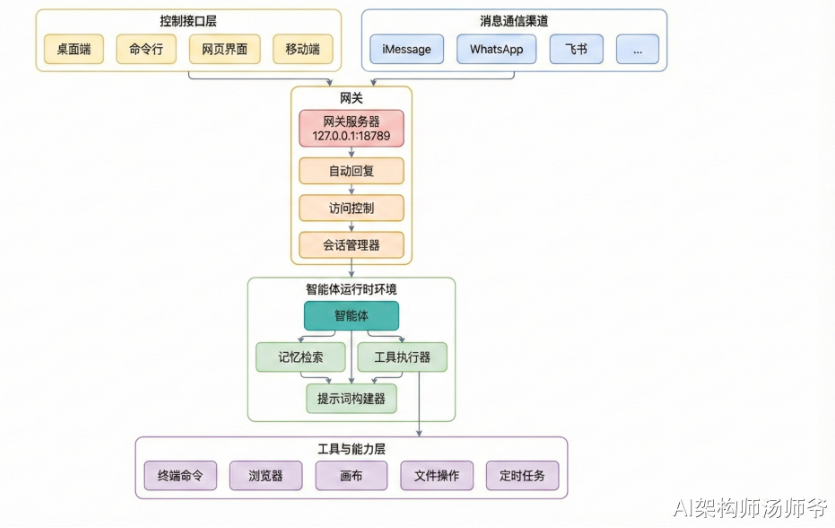
入门课程: https://openclaw101.dev/zhhttps://claw101.com/https://github.com/pudge0313/openclaw-https://www.openclaw101.club/ 参考文章: 一文彻底搞懂 OpenClaw 的架构设计与运行原理(万字图文) - AI架构师汤师爷 - 博客园 1. OpenClaw 软件架构概览 OpenClaw 的架构核心在于**“感知-推理-执行”**的异步循环。它不像传统的线性 API 调用,而是一个基于状态机的自治系…
https://www.ai-elements-vue.com/overview/introduction 使用spring cloud 技术开发的ERP系统,ERP系统包含了很多个微服务,前端是VUEJS。如何开发一个MCP接口给llm agent使用?请详细描述技术方式,并列举案例给一个完整实现。技术上继续使用spring AI最新最成熟架构技术。 下面我直接按 企业级可落地架构 来讲,而不是概念介绍。目标是: ✅ 让 Spring Cloud 微服务 ERP → 暴露 MCP(Model Con…
1. 为什么要强调“端到端 RUL” 在真实制造业场景中,很多所谓“RUL 项目”会失败,原因通常不是算法不先进,而是: 端到端 RUL关注的不是“预测准不准”,而是: 预测结果是否能持续、可信、可解释地驱动维护决策 这意味着:RUL 必须被设计为一个 系统能力(System Capability),而不是一个孤立算法。 2. 端到端 RUL 的总体架构视角 从工程角度,一个完整的 PHM RUL 系统至少包含 6 个层级: 展开为工业可实施架构: 3. 数据层:端到端 RUL 的“地基工程” 3.1 RUL 的三…
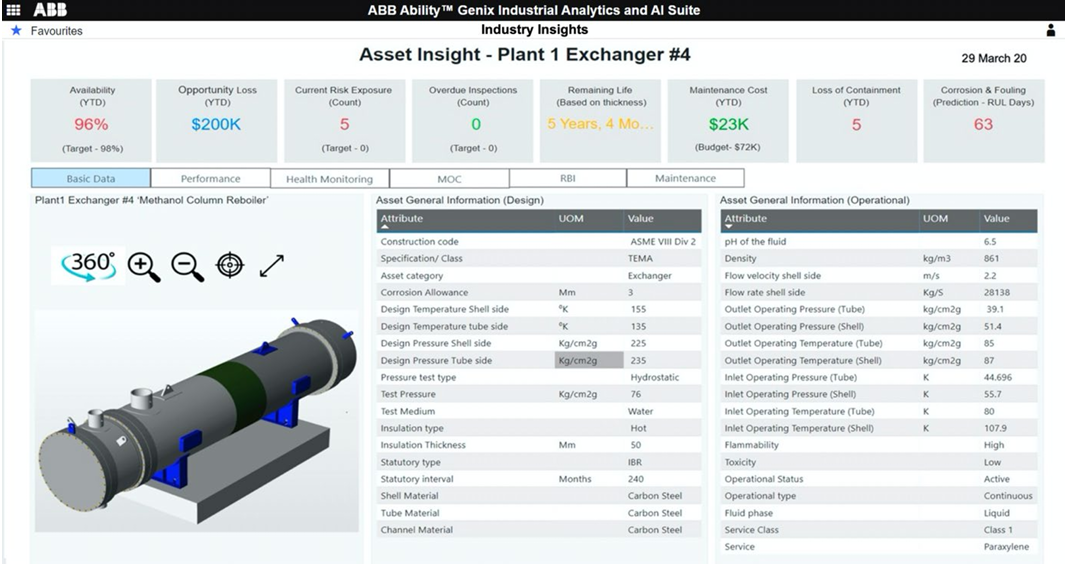
1. ABB Ability 在 PHM 领域的真实定位 1.1 ABB 并不是“软件公司起家”的 PHM 这是理解 ABB Ability 的第一关键点。 ABB Ability 的 PHM 能力不是从数据科学实验室反推出来的,而是从以下三个传统工业能力“长出来的”: 这决定了 ABB 的 PHM 具备三个显著工程特征: 特征 含义 强机理 大量使用一阶物理模型(first-principles) 强设备语义 资产模型不是“标签集合”,而是工程对象 强 OT 融合 PHM 深度嵌入控制系统,而非外挂 Verdan…
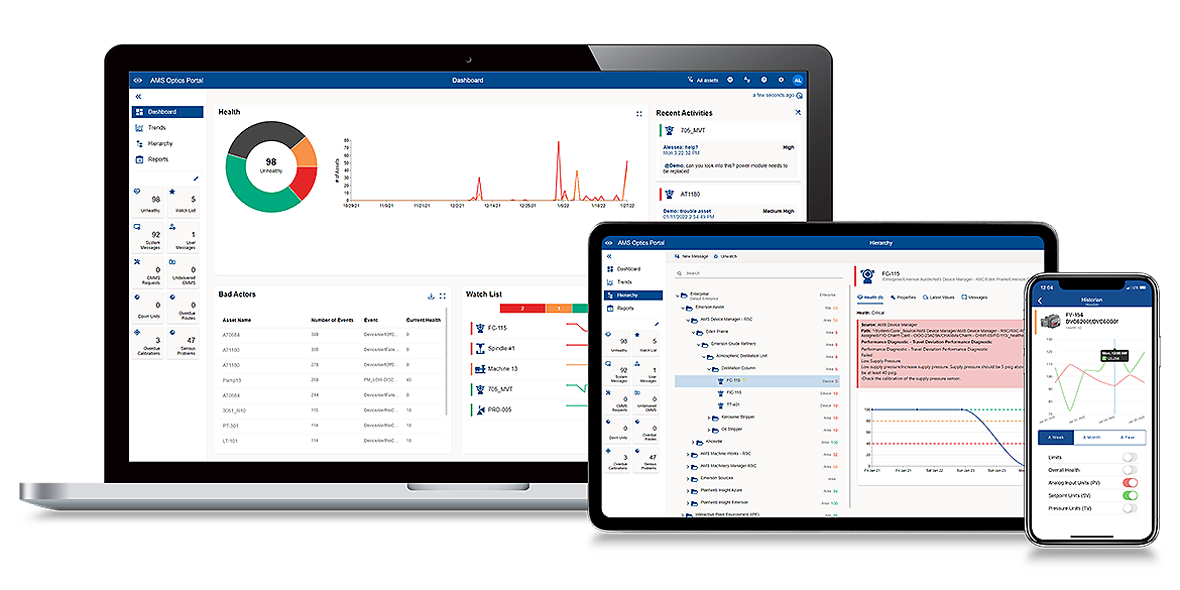
Emerson AMS 不是一个“单一软件”,而是一整套“过程工业 PHM 基础设施”。所以下文会从理念 → 架构 → 数据 → 模型 → RUL → 决策 → 工程哲学逐层展开。 Emerson AMS PHM 系统深度技术解析 ——过程工业中最“工程化”的资产健康与寿命管理体系 一、Emerson AMS 的 PHM 定位(非常关键) 在讨论 Emerson AMS 之前,必须先明确一个事实: Emerson AMS 并不是“为了 PHM 而生”,而是为了“设备可用性与过程安全”而生。 因此它的 PHM 具备三…