ClearScript 详细介绍 ClearScript 是微软开发的一个开源库,用于在 .NET 应用程序中嵌入和运行 JavaScript 代码。它提供了对流行的 JavaScript 引擎(如 V8 和 Chakra)的封装,使 .NET 开发者能够轻松地在应用程序中执行 JavaScript。 核心特性 1. 多引擎支持 2. 跨平台能力 3. 双向互操作性 架构组成 .NET 应用程序 ↓↑ClearScript 适配层 ↓↑JavaScript 引擎 (V8/Chakra) ↓↑JavaScript 运…
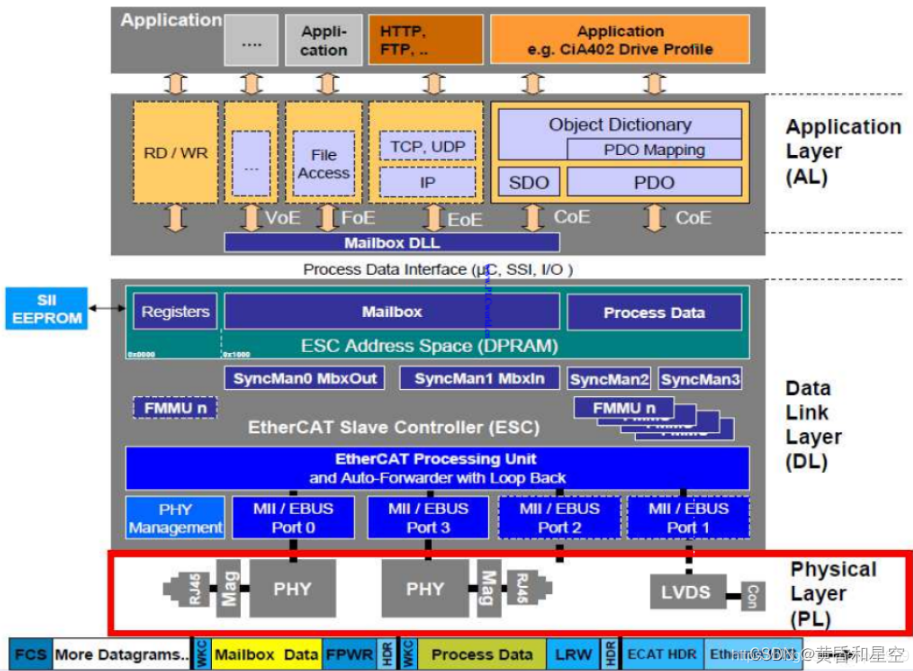
一、官方文档介绍 二、架构图 三、EtherCAT与CoE的关系 CoE(CANopen over EtherCAT)是EtherCAT的应用层协议之一,将CANopen协议(CiA 301/402标准)移植到EtherCAT网络中,主要特性包括: 70%以上的从站使用的是CoE协议。 EtherCAT的其它应用层协议 EtherCAT总共支持CoE、SoE、EoE、FoE、AoE 多种应用层协议。

IOT
常见工控机CPU&GPU性能对比RK3588 RK3576 RK3506J RK3568 J1900 J2900 J4125 J6412 N97 N100 N5095 i5-4200u i7-5500U i7-1360P 全志 T113-i
提示词:用1个表格分别对比以下CPU的CPU DMIPS与GPU算力 RK3588 RK3576 RK3506J RK3568 J1900 J2900 J4125 J6412 N97 N100 N5095 i5-4200u i7-5500U i7-1360P 全志 T113-i 以下是针对用户要求的CPU与GPU性能对比表格,综合了瑞芯微(RK系列)、英特尔(J系列、N系列、i5/i7)、全志(T113-i)等处理器的关键参数。数据主要来源于搜索结果中的公开规格及行业标准,部分未明确提及的型号通过同类产品推算或参考…

本文转载来自:作者:沃德天帅德布曜布曜德·杨(674210745)群 安装方法: 伺服控制: IO控制: 问题汇总: 1.Unable to load DLL ... or one or its 缺少DLL 答:看执行文件夹下 是否存在该DLL 存在则安装一下群文件中的WinPcap 不存在则请参考群主博客(windwos系统 请按x86_x64 将win-..zip中的dll 拷贝到执行文件夹中) 2.EtherCATSlave_CiA402 EtherCATSlave_CiA402_1 EtherCATSlav…
总结: 一、步进电机与伺服电机核心对比 对比维度 步进电机 伺服电机 控制方式 开环控制(无反馈),通过脉冲数控制步距角(如1.8°或0.9°)。 闭环控制(编码器反馈),实时调整位置/速度,精度可达±0.01°或更高。 速度性能 低速适用(通常<1000rpm),高速时扭矩下降明显。 高速稳定(3000-5000rpm),全速域恒扭矩输出。 精度差异 步距角决定精度(如±0.9°),存在累积误差;细分技术可提升但有限。 编码器反馈实现微米级定位,无累积误差。 过载能力 无过载…
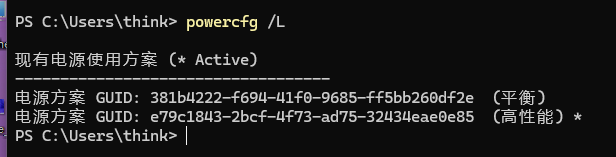
方法一、开启高性能模式 应用于电脑没有高性能模式的场景。 打开终端管理员,输入一下命令查询查询高性能GUID: 设置高性能模式,使用 powercfg setactive + 查询出来的GUID设置。 移除不需要的模式: 使用powercfg /L命令查询已有模式: 使用powercfg /d + GUID删除查询出来的电源模式。 方法二、设置CPU最小处理频率 制面板——》系统和安全——》电源选项 高性能(默认选择)——》更改计划设置——》更改高级电源设置——》处理器电源管理——》最小处理器状态——》5%改为10…
参考链接: 协议介绍:EtherCAT基础知识 - 知乎 EtherCAT有开源库可以在windows上用的吗? - 知乎 ethercat的开源主站有IGH,SOEM两种,前者是linux平台,后者都兼容,想再win上使用有很多限制,因为ethercat设计的目的就是工业总线,里面主要有PDO和SDO两种类型的数据,前者需要固定的定是周期发送或者接受数据,广泛的是1ms的周期,想想win下怎么能做到固定1ms定时周期呢?我曾经测试过,及时是用多媒体定时器或者说用优先级最高的线程自己做定时器,跑1个小时都有那么几次…
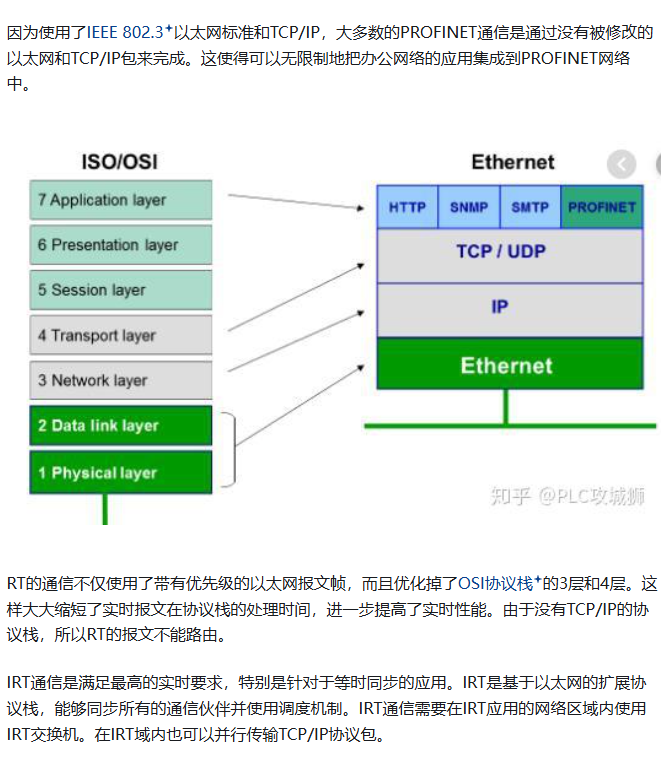
https://www.bilibili.com/video/BV123411A7g4 快速建立Profinet主站、从站开发测试环境 - 知乎 profinet实现方案整理_profinet协议栈-CSDN博客 一、协议介绍 Profinet 是 PI 推出用于自动化的、开放的工业以太网标准。Profinet 使用 TCP/IP 和 IT标准,是一种实时以太网,既支持标准的 TCP/IP,又提供标准以太网不能实现的时间确定性。 PROFINET=PROFIbus+etherNET,把Profibus的主从结构移植…