一、整体厂商
国外:忽略
国内主流:固高、雷赛、凌华
国内小众:博派、动博士
应用行业:点胶机、激光切割、螺丝机、自动上下料机、钻孔机、视觉分拣、对位贴合等等自动化设备。
二、整体架构
2.1工控机PCI型
以雷赛为例,通过工控机PCI卡槽插入核心卡,然后通过电缆线连接接线板,有多个运动控制轴。


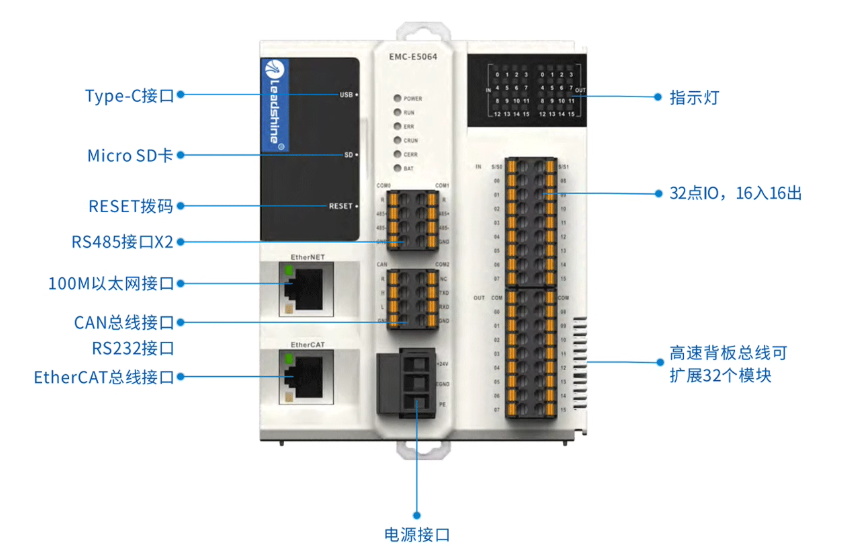
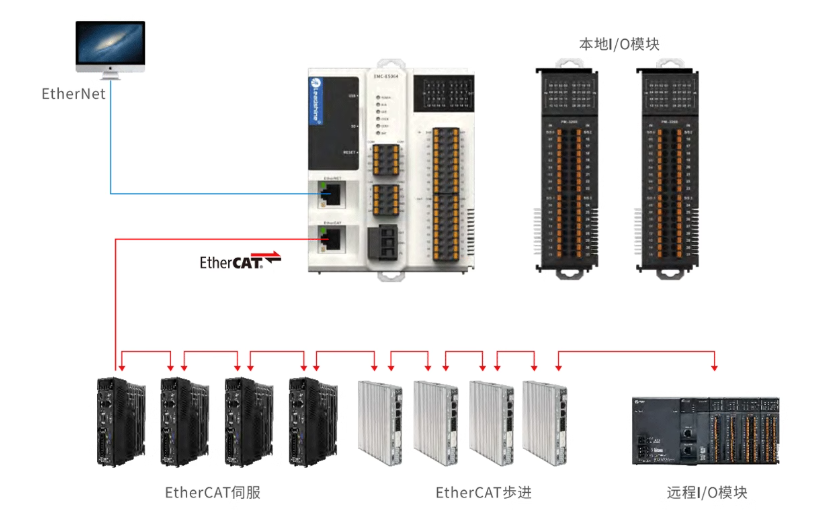
2.1 EtherCAT控制器型
以雷赛EMC1400举例,上位机电脑通过EtherNET与运动控制器通讯。运动控制器通过EtherCAT连接伺服,可以控制32、64个伺服控制器。通过EtherCAT连接编码器高速计数器。
整体基于EtherCat高速总线,理论上可实现0.5us微秒级别的运动控制。


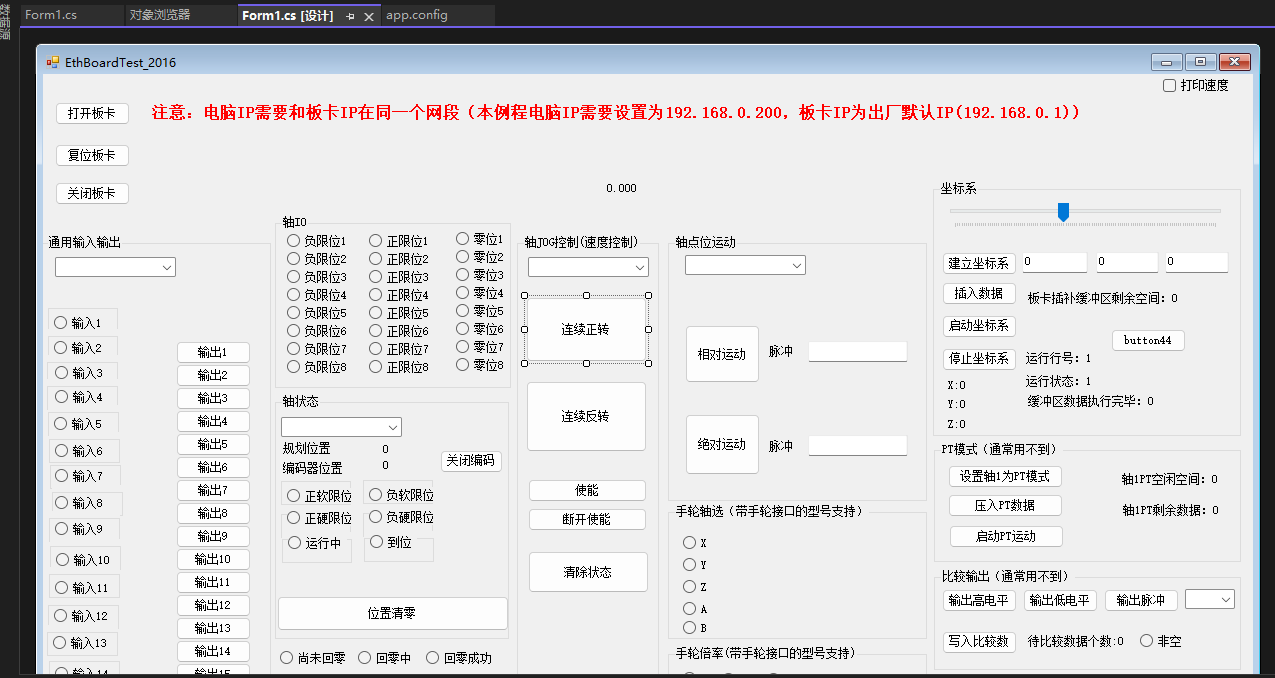
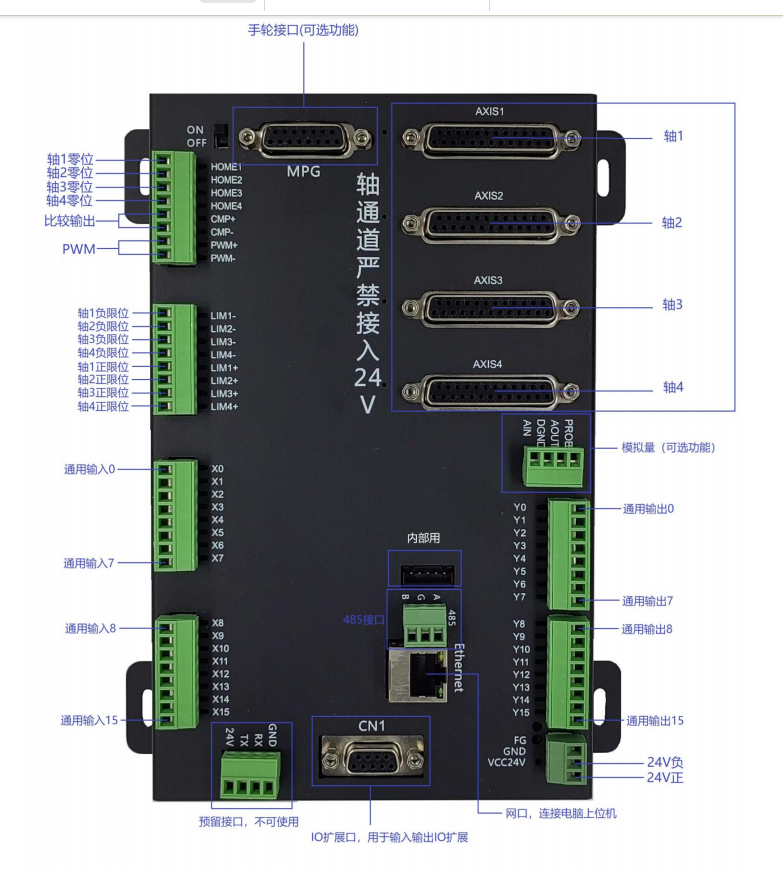
2.3 单板型
下图以博派单板型为例,支持一个EtherNET网口,与上位机通信。单板上支持多个运动控制轴、DI、DO、ABZ编码器。

下图以动博士为例,多轴运动控制卡。



远程IO方面
远程运动轴IO主要分为ProfiNET协议和EtherCAT协议,这两种协议,再支持实时通讯的交换机上,都支持us级别的运动控制。
Profinet和EtherCAT是两种主流的工业实时以太网协议,它们在实时性、拓扑结构、易用性等方面存在显著差异。以下是两者的核心区别:
1. 实时性与同步性能
- Profinet
分为三个版本:CbA(响应时间100ms,适用于一般控制)、RT(软实时,10ms级)和IRT(同步实时,<1ms,用于运动控制)。其IRT版本通过时间片技术和专用交换机芯片实现硬实时,循环时间250μs至4ms,抖动约1μs。 - EtherCAT
采用“on-the-fly”技术,数据帧在传输过程中被节点实时处理,无需存储转发,响应时间可达微秒级(典型值<100μs),时钟同步精度达纳秒级(分布式时钟技术),适合高精度运动控制。
2. 拓扑结构与扩展性
- Profinet
支持星型、总线型、环形等拓扑,但需专用IRT交换机,网络节点数限制为60个,交换机级联不超过25个,拓扑灵活性较低。 - EtherCAT
拓扑极灵活(线性、星型、树型、混合型等),无需交换机,理论支持65535个节点,且支持线缆冗余,适合复杂布线场景。
3. 易用性与地址管理
- Profinet
需手动配置从站地址和MAC地址,新增设备需重新调整网络地址,管理复杂且易受ARP攻击影响。 - EtherCAT
从站地址自动生成,支持热插拔,无需手动配置,用户体验更友好。
4. 成本与开源性
- Profinet
需专用硬件(如西门子PLC的Profinet板卡),成本较高,但设备兼容性和标准化程度高。 - EtherCAT
开源协议,基于标准以太网硬件,硬件成本更低,但设备性能受厂商实现水平影响。
5. 应用场景
- Profinet
全能型协议,适用于汽车制造、过程控制等领域,支持无线传输、快速启动等功能,与IT系统集成更优。 - EtherCAT
专注高速运动控制(如工业机器人、数控机床),在需要纳秒级同步和多传感器融合的场景中占优。
ProfiNET协议IO:

EtherCAT协议IO:

三、上位机通讯方面
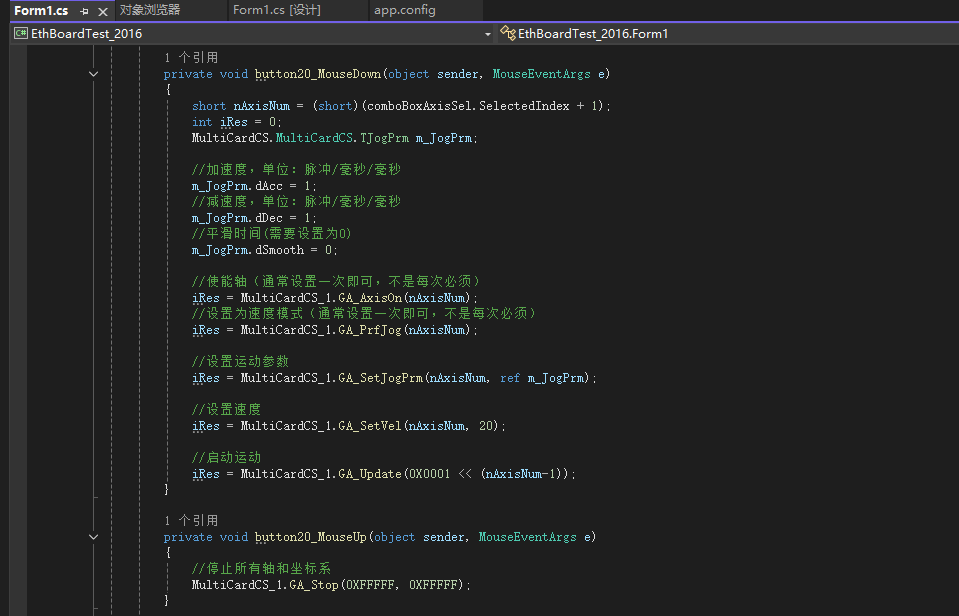
上位机各家提供的SDK都差异不大,支持dotnet/c++/python等常见语言,以动态链接库的形式提供。
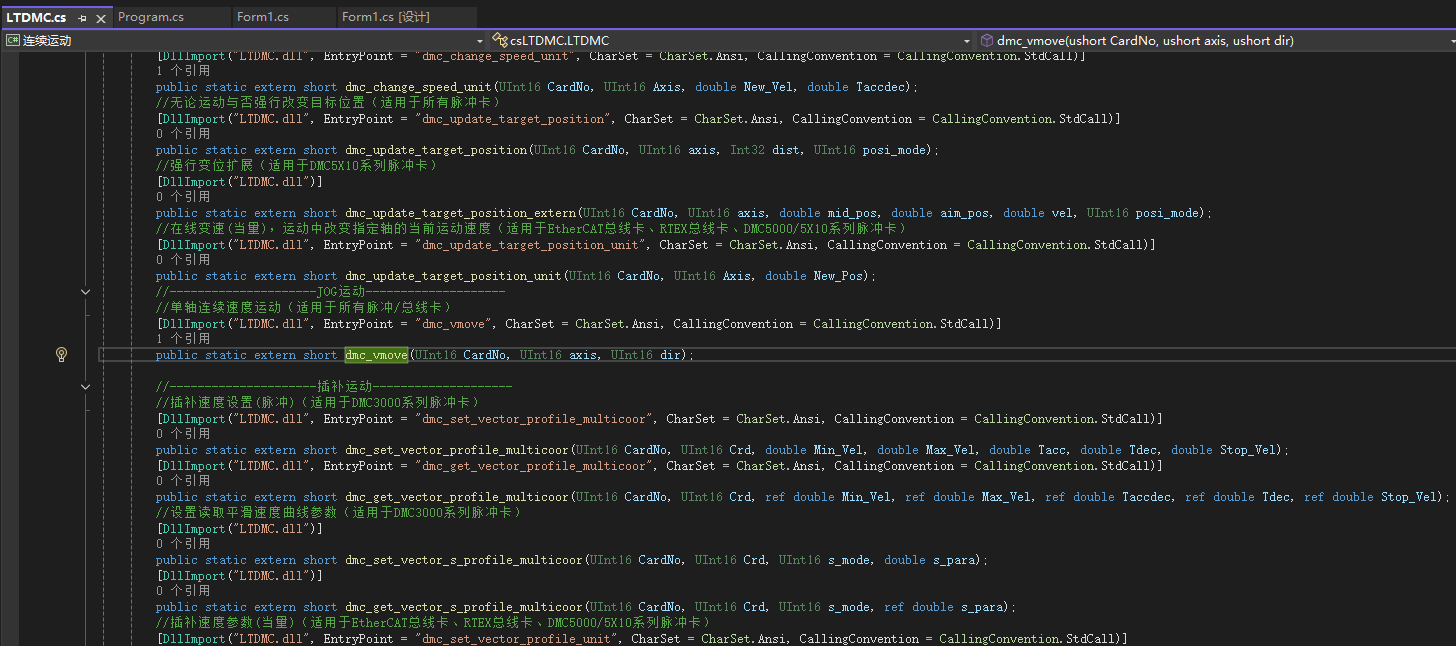
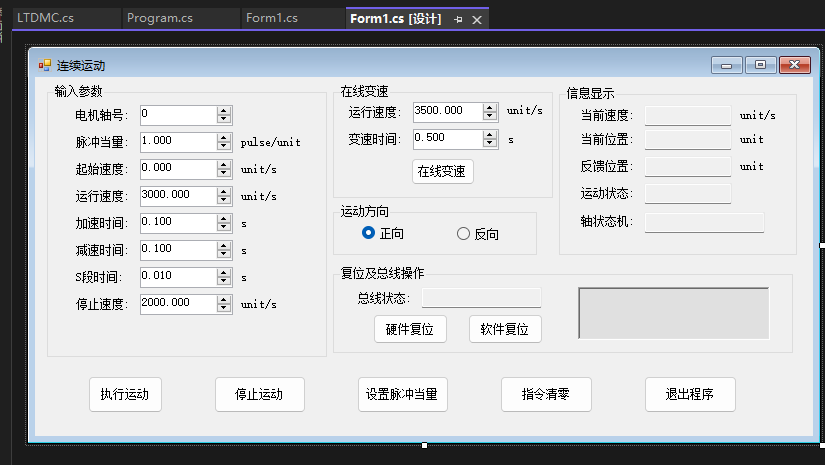
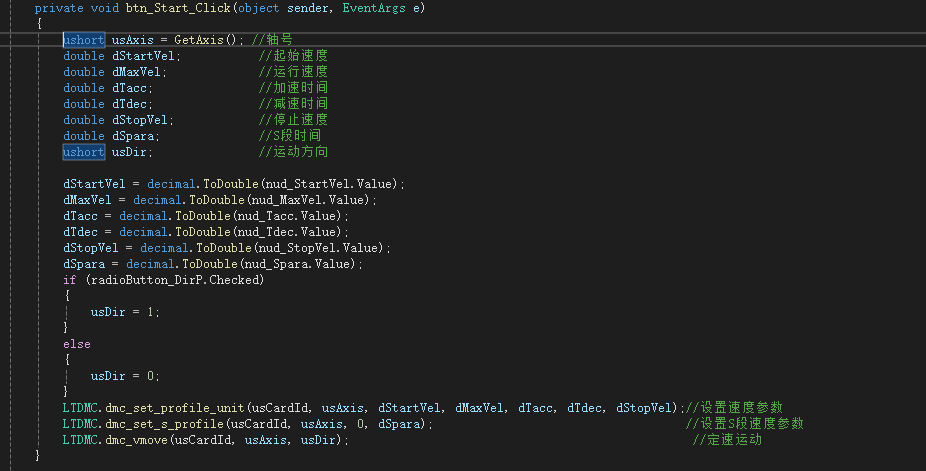
3.1雷赛SDK
以dotnet举例,雷赛提供了C++版本LTDMC.dll动态链接库,支持dotnet实现调用。
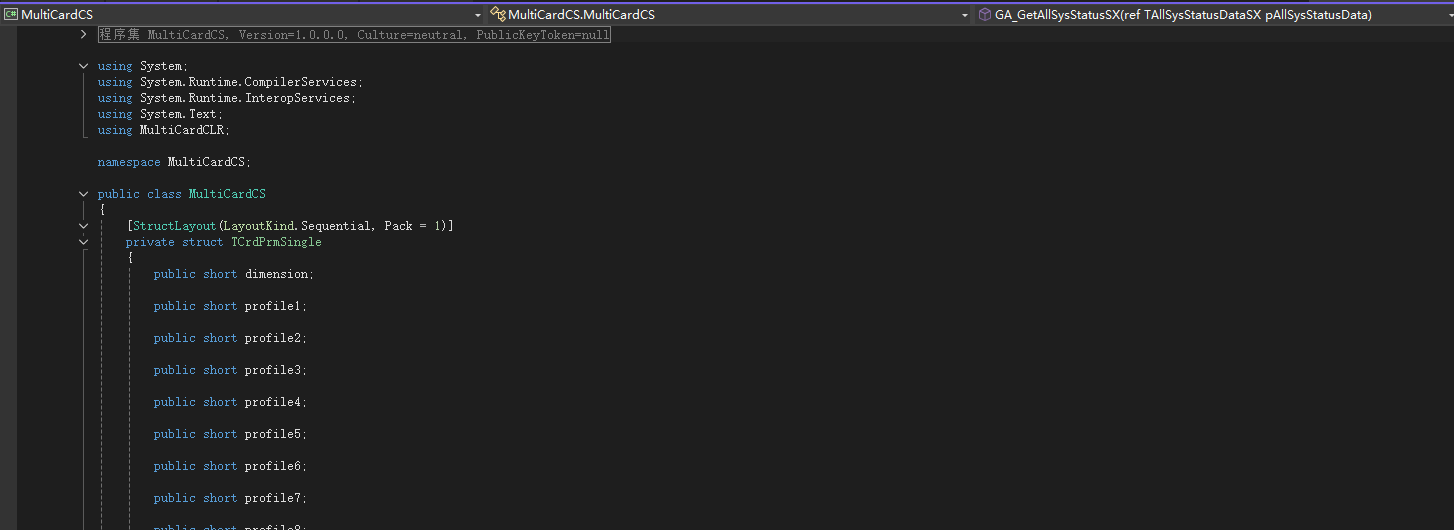
3.2博派SDK
博派提供了MultiCard.dll、MultiCardCLR.dll、MultiCardCS.dll 原生dotnet dll sdk,支持dotnet直接调用。