一、基本用法
信号线
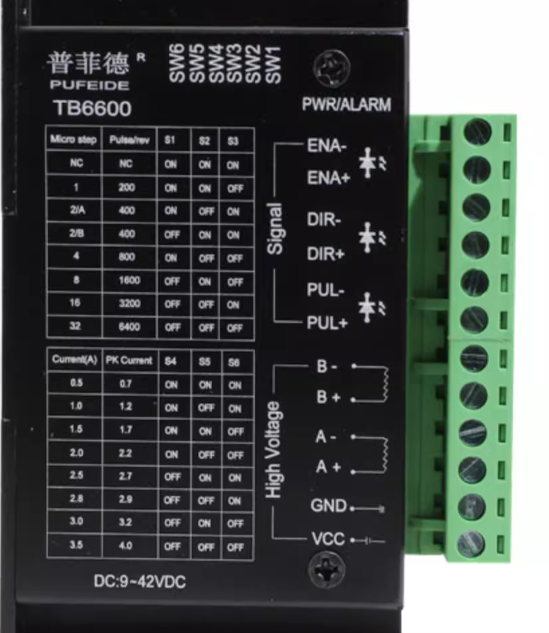
大多数步进电机驱动器的控制信号(PUL、DIR、ENA)采用 差分输入 设计,即通过 “+”和“-”端子 接收信号,以提高抗干扰能力。例如:
PUL+/-:脉冲信号的正负端,上升沿或下降沿有效。
DIR+/-:方向信号的正负端,高/低电平决定电机转向。
ENA+/-:使能信号的正负端,高电平通常禁用电机(自由状态),低电平或悬空时使能。
差分信号的高电平通常为4-5V,低电平为0-0.5V。若使用+12V或+24V电源,需串联电阻限流。
少部分驱动器采用共阴、共阳等方案,实现单端接入。
二、注意事项
信号电压差分信号
注意:
- 少部分驱动器的PUL/DIR信号线,限制5V的电压,如果要接入24V的PLC,那么需要串联电阻。
- 部分PC运动控制器,要求PUL/DIR信号线,千万不要捅到24V上,比如接到5V伺服信号线上,否则会烧板子。


