一、基础信息
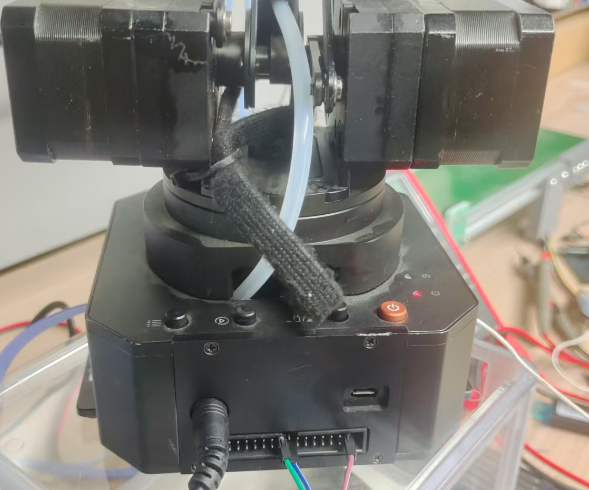
设备:uArm Swift Pro
S/N: UP13001xxxxxxxxx
当前固件:uArm Swift Pro V4.9.0
二、常规使用
使用USB连接机器人后,打开机器人管理软件UFACTORY uArm Studio,即可实现机器人的编程、示教等工作。
三、机身自带UART的使用
博主使用的是uArm Swift Pro V4.9.0固件,本身就支持USB串口和UART串口同时使用,无需下载特殊固件版本。
具体接线图见下:
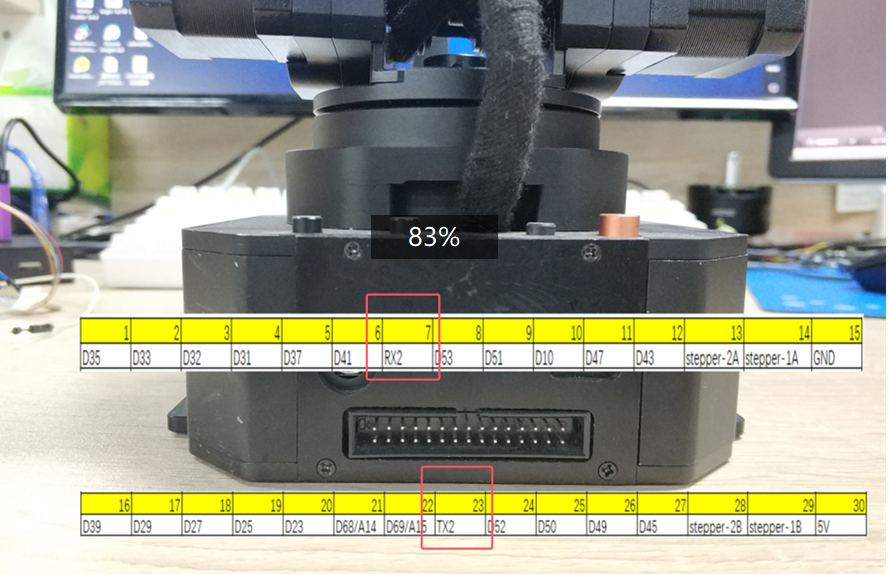
博主的接线方式见下图,机械臂自带的UART口与USB转TTL口直接连接。

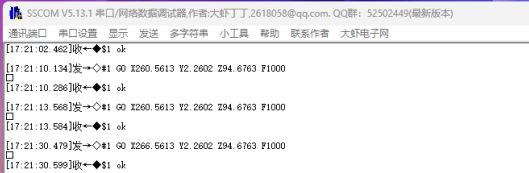
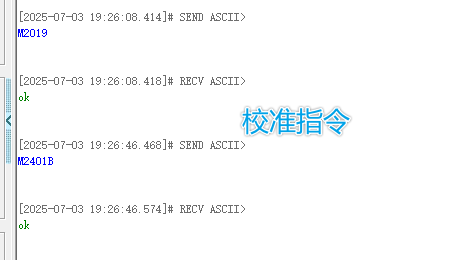
电脑上安装sscom串口工具,即可实现串口连接。
参考开发文档中的G指令,即可实现机械臂的远程控制。