一、skill目录 https://git.com/anbeime/skill 二、mcp目录 https://git.com/yzfly/Awesome-MCP-ZH 三、常用skill 写ppt : https://github.com/op7418/guizang-ppt-skill 名人蒸馏skill: https://git.com/alchaincyf/nuwa-skill
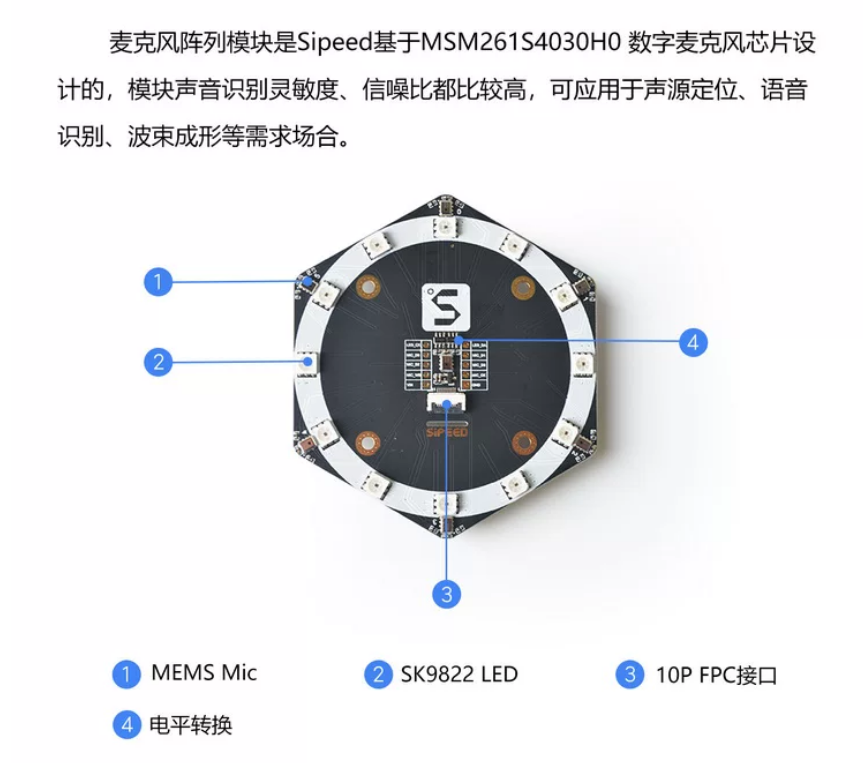
参考文件:麦克风阵列 UAC 驱动板 MA-USB8(使用指南) - Sipeed Wiki 参考文件:MaixCAM MaixPy 快速开始 - MaixPy 🎵 MaixPy 音频模块 API (maix.audio) 这个API为你提供了在MaixPy环境下处理音频文件的基础工具,目前主要包括音频格式常量和文件读写类。 音频格式常量 (Format) maix.audio 模块通过一个 Format 枚举定义了一套音频采样格式,用来统一处理不同的数据类型和字节序。文档里还提供了一个 fmt_b…

在智能工厂软件团队中,我们经常遇到一个问题:产品功能越来越丰富,但市场反应不明朗,销售难以落地,客户使用率低。为了解决这一问题,我们设计了一套三问法管理机制,帮助团队从三个视角(销售、营销、客户)验证产品价值和商业落地能力。 目标明确:三个验证维度 在实施三问法之前,我们需要明确目标,这套机制只服务于三个核心问题: 销售三问(Sales)——看“钱能不能进来” 销售是检验商业可行性的第一环节。针对销售,我们提出三个核心问题: 1. 本周最有可能成交的项目是哪个?当前卡在哪一步? 销售需给出: 2. 客户愿意为哪一个…
33岁男性程序员12天前觉得腰不舒服,估计是最近一个月开始练八段锦,练习下腰所致。0~6天都在办公,越来越不舒服。6~9天出门旅游感觉腰已经好了。第10天背了比较沉的双肩包走了2个小时,腰就恶化到了第6天的水平。第10~12天在上班,感觉不舒服。最近几天早上起来也不舒服,没有刺痛、麻木。感觉不舒服的在左侧后腰。第15天腰肌略好转,随由GPT大模型出了训练计划,开始康复训练。 🧠 腰部康复训练总表 每天16:00~19:00 花费25分钟完成本训练。久坐办公每30分钟必须起身2~3分钟。坐久后做1~2…
本人是一个33岁+IT从业者,右手小臂桡尺侧中间或尺骨侧中段从2025年5月中旬电脑打字时偶尔有刺痛,但现在8个月一直没好,高频打字反而更严重,前臂一直有不舒服的感觉,感觉隐痛酸胀,右手没左手肌肉软。打字偶尔超过几个小时会刺痛,最近几个月日常隐隐痛。右手前臂MRI核磁监测没有问题,颈部核磁医生说没问题但看起来是有问题的前兆。前臂臂按压不痛,无麻木感。用扶他林时能减少不舒服。最近2个月都没用右手,但还是感觉不舒服,虽然没有刺痛,但一直感觉还是隐痛。休息热敷没有明显效果。 最近左手同位置,也出现了不适感。 Ǻ…
下面我用最清晰、最工业界标准的方式说明: ⭐ 总结一句话 LSL/USL = 规格限(Spec Limits) → 客户要求 / 产品必须满足的硬性边界LCL/UCL = 控制限(Control Limits) → 工艺过程的统计波动边界,用于监控工艺是否稳定 两者是完全不同的概念、不同用途、不同来源。 ✅ 一、LSL / USL(Lower / Upper Specification Limit) → 规格限 / 客户要求 / 工程要求(硬标准) 定义:产品最终必须满足的上下限,由设计…
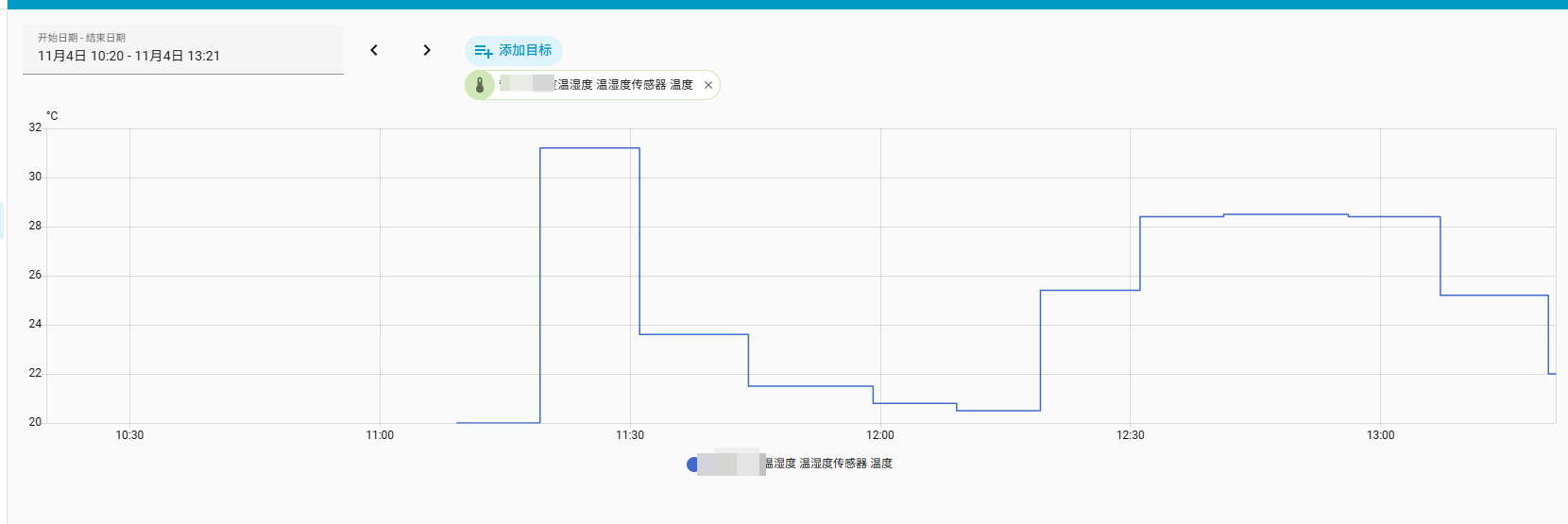
设备:米家智能温湿度计3mini 蓝牙版 蓝牙网关:小爱音响 博主想用米家温湿度计来免接线,接入一个区域的温湿度。但是通过Home Assistant的统计数据发现上报频率太慢了,不管温度有没有变化,几乎都是间隔10分钟上报一次。 遂放弃。
总结: 一、步进电机与伺服电机核心对比 对比维度 步进电机 伺服电机 控制方式 开环控制(无反馈),通过脉冲数控制步距角(如1.8°或0.9°)。 闭环控制(编码器反馈),实时调整位置/速度,精度可达±0.01°或更高。 速度性能 低速适用(通常<1000rpm),高速时扭矩下降明显。 高速稳定(3000-5000rpm),全速域恒扭矩输出。 精度差异 步距角决定精度(如±0.9°),存在累积误差;细分技术可提升但有限。 编码器反馈实现微米级定位,无累积误差。 过载能力 无过载…