https://www.tube.com/watch?v=mrXtx74ZR_A&list=PLAKe3qXMcVpmk9WGFIgtTQLWOeXN0pl1-
https://www.tube.com/watch?v=LJH1CtBLsxU&list=PLrXhrI7zUoqQB5YU78gENYF_Zyc0pKhu7&index=4
从工程视角解构 Bently Nevada PHM 系统
——旋转设备健康监测与寿命预测的工业级实现范式
1. Bently Nevada 的 PHM 定位(先定性)
Bently Nevada ≠ 通用 PHM 平台
Bently Nevada = 旋转设备 PHM 的“工业事实标准”
其 PHM 特点高度集中在:
- 汽轮机
- 压缩机
- 泵
- 风机
- 电机
- 发电机
- 高速 / 重载旋转轴系
换句话说:
它不是“什么都能监控”,而是“旋转设备必须用它”
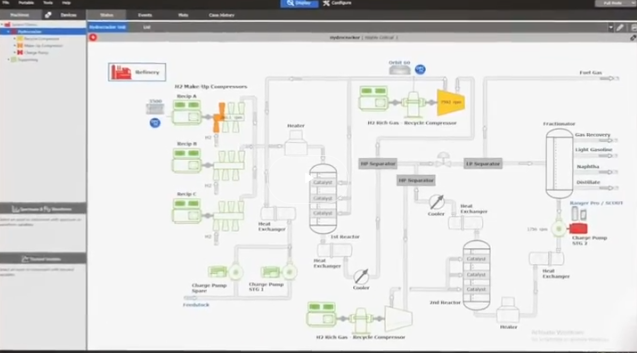
2. 整体 PHM 架构(真实工程形态)
2.1 分层架构(非常传统,但极其扎实)
┌───────────────────────────────┐
│ Decision Layer │
│ (Maintenance / Alarm / Risk) │
└────────────▲──────────────────┘
│
┌────────────┴──────────────────┐
│ Diagnostic & Prognostic │
│ (Fault + Degradation) │
└────────────▲──────────────────┘
│
┌────────────┴──────────────────┐
│ Signal Processing & Feature │
│ (Time / Freq / Orbit) │
└────────────▲──────────────────┘
│
┌────────────┴──────────────────┐
│ High-Fidelity Sensors │
│ (Proximity / Vel / Accel) │
└───────────────────────────────┘
⚠️ 你会发现:
Bently 的 PHM 是“从物理到决策”的垂直体系,而不是 IT 平台。
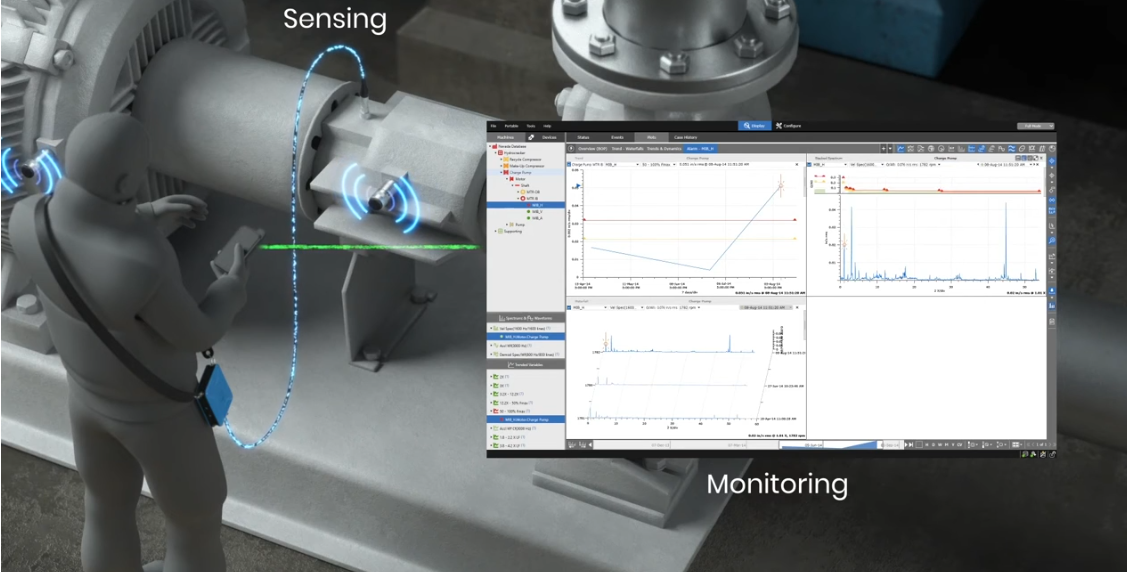
3. 传感器层:PHM 的根基(不可替代)
3.1 核心传感器不是“振动”,而是轴系状态
Bently Nevada 的 PHM 从一开始就不是“泛振动”思路:
| 传感器 | 测什么 | 工程意义 |
|---|---|---|
| Proximity Probe | 轴心位移 | 转子真实运动 |
| Velocity Sensor | 结构响应 | 能量传递 |
| Accelerometer | 高频冲击 | 局部故障 |
| Keyphasor | 相位 | 频率同步 |
关键认知:
Bently 监控的是“转子动力学”,不是“设备表面振动”。
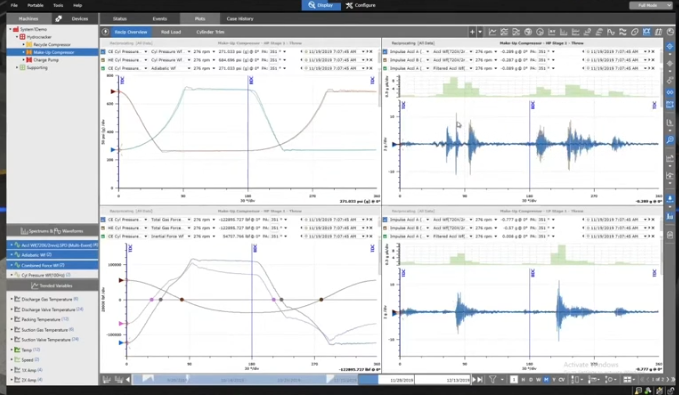
3.2 采样策略(极度工业化)
- 常规监测:1x / 2x / Sub / Supersynchronous
- 事件捕获:Transient / Start-up / Coast-down
- 长期趋势:小时 / 天 / 周
这直接决定了它能做 退化建模,而不是“报警”。
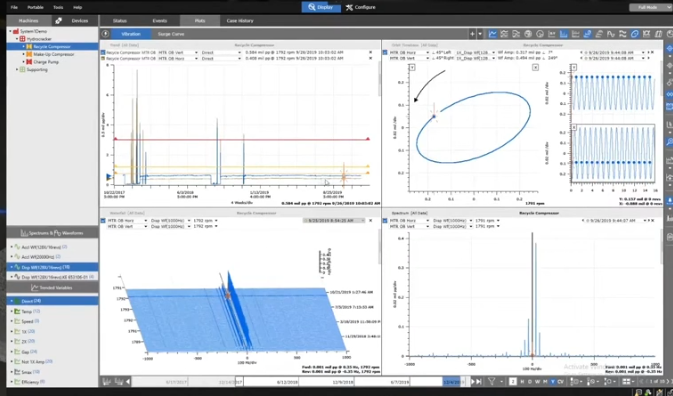
4. 信号处理层:Bently 的“护城河”
4.1 核心不是 FFT,而是物理相关特征
典型特征族:
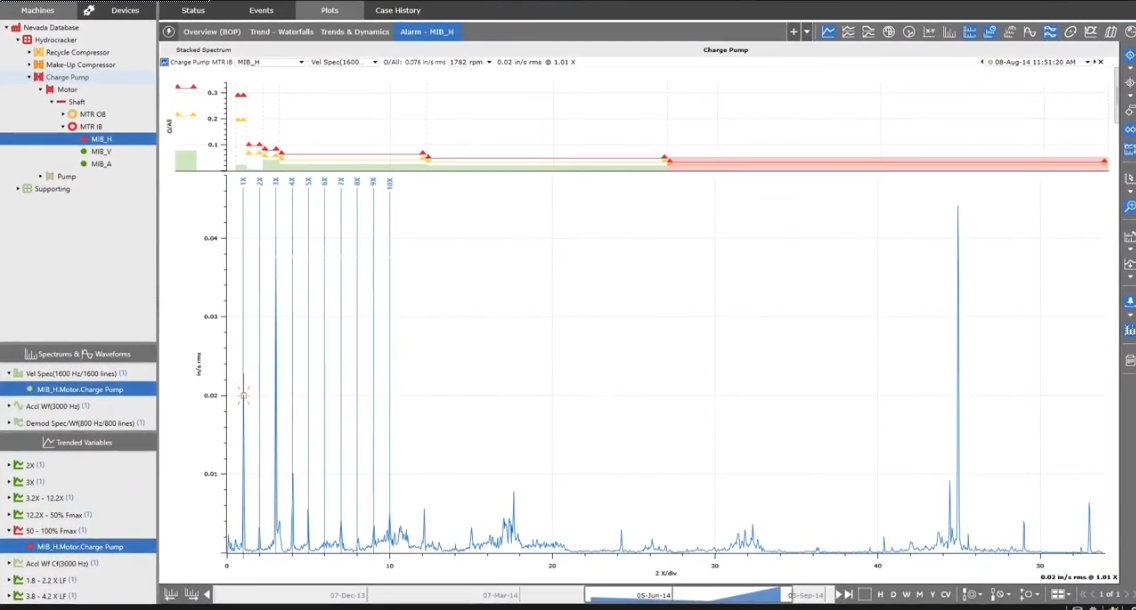
4.1.1 频域(Frequency Domain)
- 1× / 2× 转频
- 次同步(油膜振荡)
- 倍频边带
- 共振放大区
4.1.2 轨迹(Orbit / Shaft Centerline)
- 轴心轨迹
- 偏心趋势
- 动静间隙变化
这是绝大多数 AI 振动系统完全做不了的东西。
4.2 退化不是“异常检测”,而是状态演化
Bently 的核心思想是:
Normal → Degraded → Fault → Failure
而不是:
Normal → Anomaly
5. 诊断层(Diagnostics):不是 AI,而是工程知识库
5.1 故障不是“预测出来的”,而是识别出来的
典型内置 Fault Model:
- 不平衡
- 不对中
- 轴承磨损
- 润滑不良
- 轴裂纹
- 摩擦 / Rub
- 共振锁定
每一种都有:
- 特征模式
- 发展路径
- 工程解释
这就是为什么:
Bently 的“准确率”不是算法指标,而是工程共识
6. RUL 的真实实现方式(重点)
6.1 Bently 并不迷信“数值 RUL”
与很多论文不同:
Bently 很少直接给一个“还剩多少天寿命”
而是采用:
6.2 退化阶段 + 风险窗口
Degradation Stage
├─ Stable
├─ Early Degradation
├─ Advanced Degradation
└─ Imminent Failure
然后映射为:
- 可运行窗口
- 检修建议区间
- 禁止运行条件
6.3 RUL 的本质是“安全运行时间窗”
工程表达更接近:
Safe Operating Horizon (SOH)
而不是数学 RUL。
7. 决策层:PHM 的最终价值
7.1 输出不是预测,是动作建议
Bently 系统最终输出的是:
- Alarm(实时保护)
- Advisory(工程建议)
- Trip(硬保护)
- Maintenance Window
典型示例:
“在当前载荷下,设备可安全运行 3–5 周,建议在下次停机窗口检查轴承 B。”
8. Bently PHM 的“工程哲学总结”
8.1 三个核心原则
原则 1:物理优先于数据
没有物理意义的模型是危险的。
原则 2:退化优先于异常
异常是结果,退化是过程。
原则 3:决策优先于预测
运维需要的是“什么时候修”,不是“模型多准”。
9. 对PHM 系统的直接启示
Bently 给你的最重要启示是:
❌ 不要直接做“AI RUL”
✅ 先做“退化阶段识别 + 安全运行窗口”
10. 用一句话评价 Bently Nevada PHM
它不是最“聪明”的 PHM 系统,但一定是最“可信”的。
